登錄
登錄
 注冊
注冊
RFID 導購機器人導航與控制系統的設計研究
作者:RFID世界網 收編
來源:維庫電子市場網
日期:2009-10-26 10:50:23
摘要:本文采用了無線射頻識別技術、紅外線距離傳感技術和地磁感應電子羅盤相結合的方法,設計出了一種基于DSP控制的信息融合的自主移動的機器人的導航與控制系統。
本文采用了無線射頻識別技術、紅外線距離傳感技術和地磁感應電子羅盤相結合的方法,設計出了一種基于DSP控制的信息融合的自主移動的機器人的導航與控制系統。并且在設計的過程中根據實際情況的需要,對傳統的紅外避障傳感器進行了一些改進,同時,對信息融合狀態下的DSP系統的驅動架購設計,作出了一些研究和論述。給出了小型機器人的運動控制的驅動電路的設計。最后,對這種架構下的自行設計出來的機器人,在超級市場中進行了實際的穩定性測試。
1 前言
隨著科學技術發展和人民生活水平提高,機器人已經開始進入了人們的生活中。這個時代的來臨,出現了各種新型機器人,如清掃機器人、安防機器人。移動機器人的最重要的部分之一:導航系統,更加引起機器人領域的關注。機器人導航系統對許多機器人應用領域至關重要如:智能倉庫,超市導購,家用機器人,自動化圖書館,智能醫院等。比較普遍的是尋線機器人。作者在讀研期間,多次參加這類機器人比賽和設計。實際設計中發現:因為受到固定線的限制,這種體系并不能實現真正意義上的全方位的自主運行。另外,這種方法受到光的影響很大,不能實際的應用與生活中。線在地表也會影響地面美觀。在經過充分的文獻查找和思考后提出了一種新的機器人導航系統,把RFID,地磁感應,DSP等技術融合。進行了實際的系統硬軟件設計和穩定性測試。
2 導航硬件系統
我們開發的硬件系統主要由:DSP核心板,RFID板,系統主板,電子羅盤,驅動板構成。
2.1 DSP核心板
我們自行設計的DSP系統采用TMS320F2812為核心,2812是TI公司的一款用于控制的高性能、多功能、高性價比的32位定點DSP芯片。核心采用高速的處理機,主要是考慮以后對于系統的二次開發。以及方便算法的移植。指令系統最高可在150MHZ主頻下工作,并帶有18k的0等待周期片上SRAM和128k片上存取時間為36ns FLASH。其片上外設主要包括ADC、雙SCI、SPI、McBSP、eCAN等,并帶有事件管理模塊(EVA、EVB),分別包括6路PWM/CMP、2路QEP、3路CAP、2路16位定時器。其中的雙SCI可以一路接傳感器一路接PC及時輸出調試信息。16位的PWM可以實現精細的調速。CAP等方便了與傳感器的接口。最大輸入為3V的16路、12位,轉換時間為80ns的ADC可以同時接16路距離傳感器。2812擁有16×16位雙乘法累加器,可以為處理射頻和地磁方向信號提供足夠的處理速度。由于2812核心電壓(1.8V)和起振頻率的特殊性,此核心板采用無源晶振。
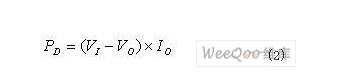
核心板采用TPS767D318雙路輸出低壓降LDO。提供雙電源,保證了核心電壓1.8V的穩定供給。TPS767D318有高速的瞬態響應,專用于DSP,最大可以提供1A的電流。可以實現對IO和核心的分時復位。有上電復位功能,低壓保護功能,其復位延遲時間為200ms。有過熱保護功能。最大功率計算可以用式1計算。
2.2 系統主板與傳感模塊
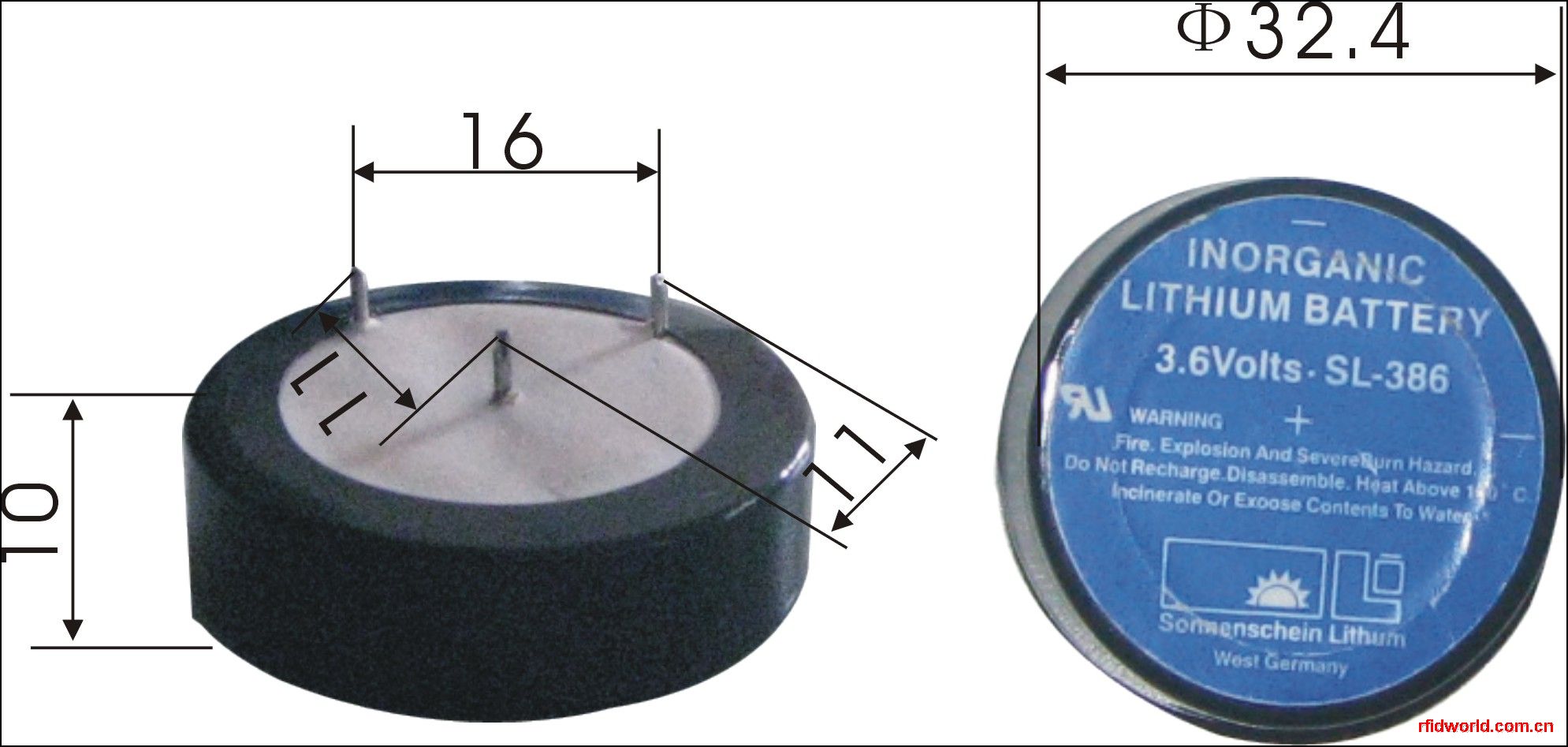
關于電源,系統采用12V鋰電池供電,采用三端正電壓調節器調節電壓。內部集成功率保護。輸出電流可以達到1A。輸入耐壓可以到達30V。提供充電接口,通過開關進行控制,電路板上留有接口,可以對鋰電池進行充電。
定位裝置采用射頻技術(RFID)。RFID已經成為一個熱門的技術。最近沃爾瑪通過了一項"要求其前100家供應商在2005年1月之前向其配送中心發送貨盤和包裝箱時使用RFID技術,2006年后逐步在單件商品中使用這項技術"的決議。從信息傳遞的基本原理來說,射頻識別技術在低頻段基于變壓器耦合模型(初級與次級之間的能量傳遞及信號傳遞),在高頻段基于雷達探測目標的空間耦合模型(雷達發射電磁波信號碰到目標后攜帶目標信息返回雷達接收機)。最基本的RFID系統由三部分組成:標簽、閱讀器、天線。按作用距離可分為密耦合卡(作用距離小于1厘米)、近耦合卡(作用距離小于15厘米)、疏耦合卡(作用距離約1米)和遠距離卡(作用距離從1米到10米,甚至更遠)。本系統采用近耦合卡。射頻模塊與2812的SCIA口進行通訊。通過對數據流進行解碼,判斷機器人的位置。
接著是紅外避障模塊。一般機器人的避障可以采用紅外反射的方法,這在機器人比賽中比較普遍。GPIO控制紅外線的發射,然后如果遇到障礙物會反射回來,接收管子收到光線后引起電阻變化,檢測其電阻變化就可以判斷是否有障礙物了。但是這種方法容易受到光噪聲的干擾。所以距離比較近,一般只能達到2-3cm。本人在多次比賽中,經過查資料和研究,提出了一種使用標準高頻信號38KHZ的紅外線進行障礙的探測的電路。因為使用高頻信號和高頻運放,有了一定的抗干擾能力,同時探測的距離的最大提高到8cm。首先,通過555發射紅外線。接著,信號通過紅外接收管后經過隔直電容,送入高頻運放LM318N,如圖4。然后,經過50倍的放大。如圖5和圖6。
最后是系統的驅動模塊的設計。采用L298芯片。L298是SGS公司的產品,比較常見的是15腳Multiwatt封裝的L298N,內部同樣包含4通道邏輯驅動電路。L298內含的功率輸出器件設計制作在一塊石英基片上,由于制作工藝的同一性,因而具有分立元件組合電路不可比擬的性能參數一致性,工作穩定。15腳是輸出電流反饋引腳,其它與L293相同。在通常使用中這兩個引腳也可以直接接地。它是高電壓的,高電流的雙全橋驅動芯片。可以直接接受標準的TTL邏輯電平。可以驅動各種負載如電機,繼電器等。有兩個使能輸入,通過它控制PWM波的有效性。L298集成有兩個能量輸出塊A,B。另外,我們設計的板子上加有續流二極管。
2.3 驅動程序設計
通過編寫InitSysCtrl()函數,對看門狗控制寄存器WDCR進行設置,其WDFLAG位是看門狗復位狀態位。如果該位置位表示一個看門狗復位。向WDDIS位寫1會使看門狗模塊無效。寫0對看門狗使能。而對于WDPS位主要是決定看門狗計數器的時鐘速率。由于程序中包含有許多循環,所以對于看門狗的設置要特別注意。然后通過設置PLLCR對系統鎖相環進行設置。這時候要注意,程序需要加入,5000次循環等待鎖相穩定。這一點在2407里并不是必要的,而針對2812系統要注意這點。然后通過HISPCP和LOSPCP來對高速和低速外設來進行匹配。由于在程序中使用了中斷,所以需要對外設中斷擴展PIE進行設置。方向傳感器通過捕獲單元和DSP核心進行連接。一次脈沖的捕獲需要兩次中斷,通過控制和讀取FIFO寄存器來取出方向的信息的脈沖編碼。另外,紅外避障模塊通過74LV245模塊,轉換電平后,和中斷管腳進行連接。所以要對中斷函數進行編程。和RFID傳感器通訊是通過2812的雙線異步串口。SCI模塊支持CPU與采用非返回至0(non-return-to-zero)(NRZ)標準格式的異步外圍設備之間的數字通信。2812的SCI接收器有一個16級深度的FIFO,這樣可以減少空頭的服務。程序通過判斷TxRDY位來判斷有沒有RFID中斷。這樣,可以及時的發現機器人是否到了一個新的位置。然后讀取SCIRXBUF。最后,通過EV單元設置PWM 脈沖,從而控制機器人的走向。
3 結論以及實現后的系統
最后,在聯華超市附近調試整個系統。經過反復調試,和對程序的修改,實現了對射頻路徑點的導航。
1 前言
隨著科學技術發展和人民生活水平提高,機器人已經開始進入了人們的生活中。這個時代的來臨,出現了各種新型機器人,如清掃機器人、安防機器人。移動機器人的最重要的部分之一:導航系統,更加引起機器人領域的關注。機器人導航系統對許多機器人應用領域至關重要如:智能倉庫,超市導購,家用機器人,自動化圖書館,智能醫院等。比較普遍的是尋線機器人。作者在讀研期間,多次參加這類機器人比賽和設計。實際設計中發現:因為受到固定線的限制,這種體系并不能實現真正意義上的全方位的自主運行。另外,這種方法受到光的影響很大,不能實際的應用與生活中。線在地表也會影響地面美觀。在經過充分的文獻查找和思考后提出了一種新的機器人導航系統,把RFID,地磁感應,DSP等技術融合。進行了實際的系統硬軟件設計和穩定性測試。
2 導航硬件系統
我們開發的硬件系統主要由:DSP核心板,RFID板,系統主板,電子羅盤,驅動板構成。
2.1 DSP核心板
我們自行設計的DSP系統采用TMS320F2812為核心,2812是TI公司的一款用于控制的高性能、多功能、高性價比的32位定點DSP芯片。核心采用高速的處理機,主要是考慮以后對于系統的二次開發。以及方便算法的移植。指令系統最高可在150MHZ主頻下工作,并帶有18k的0等待周期片上SRAM和128k片上存取時間為36ns FLASH。其片上外設主要包括ADC、雙SCI、SPI、McBSP、eCAN等,并帶有事件管理模塊(EVA、EVB),分別包括6路PWM/CMP、2路QEP、3路CAP、2路16位定時器。其中的雙SCI可以一路接傳感器一路接PC及時輸出調試信息。16位的PWM可以實現精細的調速。CAP等方便了與傳感器的接口。最大輸入為3V的16路、12位,轉換時間為80ns的ADC可以同時接16路距離傳感器。2812擁有16×16位雙乘法累加器,可以為處理射頻和地磁方向信號提供足夠的處理速度。由于2812核心電壓(1.8V)和起振頻率的特殊性,此核心板采用無源晶振。
核心板采用TPS767D318雙路輸出低壓降LDO。提供雙電源,保證了核心電壓1.8V的穩定供給。TPS767D318有高速的瞬態響應,專用于DSP,最大可以提供1A的電流。可以實現對IO和核心的分時復位。有上電復位功能,低壓保護功能,其復位延遲時間為200ms。有過熱保護功能。最大功率計算可以用式1計算。

2.2 系統主板與傳感模塊
關于電源,系統采用12V鋰電池供電,采用三端正電壓調節器調節電壓。內部集成功率保護。輸出電流可以達到1A。輸入耐壓可以到達30V。提供充電接口,通過開關進行控制,電路板上留有接口,可以對鋰電池進行充電。
定位裝置采用射頻技術(RFID)。RFID已經成為一個熱門的技術。最近沃爾瑪通過了一項"要求其前100家供應商在2005年1月之前向其配送中心發送貨盤和包裝箱時使用RFID技術,2006年后逐步在單件商品中使用這項技術"的決議。從信息傳遞的基本原理來說,射頻識別技術在低頻段基于變壓器耦合模型(初級與次級之間的能量傳遞及信號傳遞),在高頻段基于雷達探測目標的空間耦合模型(雷達發射電磁波信號碰到目標后攜帶目標信息返回雷達接收機)。最基本的RFID系統由三部分組成:標簽、閱讀器、天線。按作用距離可分為密耦合卡(作用距離小于1厘米)、近耦合卡(作用距離小于15厘米)、疏耦合卡(作用距離約1米)和遠距離卡(作用距離從1米到10米,甚至更遠)。本系統采用近耦合卡。射頻模塊與2812的SCIA口進行通訊。通過對數據流進行解碼,判斷機器人的位置。
接著是紅外避障模塊。一般機器人的避障可以采用紅外反射的方法,這在機器人比賽中比較普遍。GPIO控制紅外線的發射,然后如果遇到障礙物會反射回來,接收管子收到光線后引起電阻變化,檢測其電阻變化就可以判斷是否有障礙物了。但是這種方法容易受到光噪聲的干擾。所以距離比較近,一般只能達到2-3cm。本人在多次比賽中,經過查資料和研究,提出了一種使用標準高頻信號38KHZ的紅外線進行障礙的探測的電路。因為使用高頻信號和高頻運放,有了一定的抗干擾能力,同時探測的距離的最大提高到8cm。首先,通過555發射紅外線。接著,信號通過紅外接收管后經過隔直電容,送入高頻運放LM318N,如圖4。然后,經過50倍的放大。如圖5和圖6。
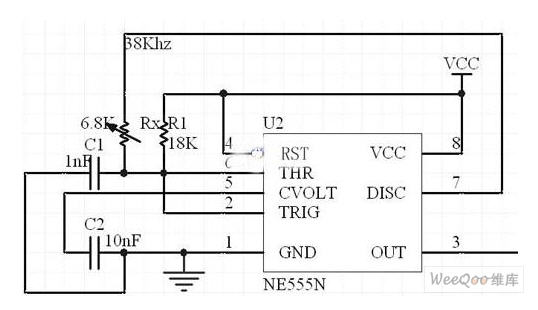
圖 1 555發射電路
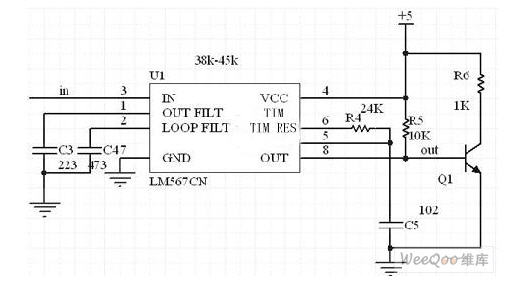
圖 2 頻率識別電路
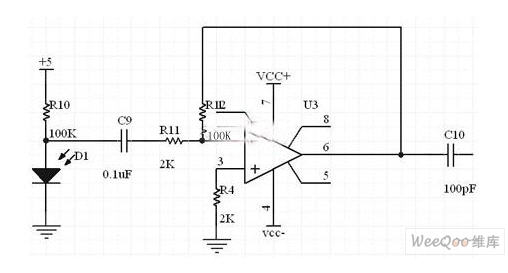
圖 3 檢測放大電路
最后是系統的驅動模塊的設計。采用L298芯片。L298是SGS公司的產品,比較常見的是15腳Multiwatt封裝的L298N,內部同樣包含4通道邏輯驅動電路。L298內含的功率輸出器件設計制作在一塊石英基片上,由于制作工藝的同一性,因而具有分立元件組合電路不可比擬的性能參數一致性,工作穩定。15腳是輸出電流反饋引腳,其它與L293相同。在通常使用中這兩個引腳也可以直接接地。它是高電壓的,高電流的雙全橋驅動芯片。可以直接接受標準的TTL邏輯電平。可以驅動各種負載如電機,繼電器等。有兩個使能輸入,通過它控制PWM波的有效性。L298集成有兩個能量輸出塊A,B。另外,我們設計的板子上加有續流二極管。
2.3 驅動程序設計
通過編寫InitSysCtrl()函數,對看門狗控制寄存器WDCR進行設置,其WDFLAG位是看門狗復位狀態位。如果該位置位表示一個看門狗復位。向WDDIS位寫1會使看門狗模塊無效。寫0對看門狗使能。而對于WDPS位主要是決定看門狗計數器的時鐘速率。由于程序中包含有許多循環,所以對于看門狗的設置要特別注意。然后通過設置PLLCR對系統鎖相環進行設置。這時候要注意,程序需要加入,5000次循環等待鎖相穩定。這一點在2407里并不是必要的,而針對2812系統要注意這點。然后通過HISPCP和LOSPCP來對高速和低速外設來進行匹配。由于在程序中使用了中斷,所以需要對外設中斷擴展PIE進行設置。方向傳感器通過捕獲單元和DSP核心進行連接。一次脈沖的捕獲需要兩次中斷,通過控制和讀取FIFO寄存器來取出方向的信息的脈沖編碼。另外,紅外避障模塊通過74LV245模塊,轉換電平后,和中斷管腳進行連接。所以要對中斷函數進行編程。和RFID傳感器通訊是通過2812的雙線異步串口。SCI模塊支持CPU與采用非返回至0(non-return-to-zero)(NRZ)標準格式的異步外圍設備之間的數字通信。2812的SCI接收器有一個16級深度的FIFO,這樣可以減少空頭的服務。程序通過判斷TxRDY位來判斷有沒有RFID中斷。這樣,可以及時的發現機器人是否到了一個新的位置。然后讀取SCIRXBUF。最后,通過EV單元設置PWM 脈沖,從而控制機器人的走向。
3 結論以及實現后的系統
最后,在聯華超市附近調試整個系統。經過反復調試,和對程序的修改,實現了對射頻路徑點的導航。

圖4 機器人在超市的實際運行



.jpg)