登錄
登錄
 注冊(cè)
注冊(cè)
一種基于 RFID 傳感器和 LoRa 技術(shù)的新型土壤環(huán)境監(jiān)測(cè)系統(tǒng)
現(xiàn)代農(nóng)業(yè)面臨著在全球人口持續(xù)增長的背景下提高生產(chǎn)力的巨大挑戰(zhàn),然而,現(xiàn)有的農(nóng)業(yè)技術(shù)在效率方面仍然存在不足,難以滿足這一需求。實(shí)時(shí)監(jiān)測(cè)土壤環(huán)境被認(rèn)為是提升農(nóng)業(yè)生產(chǎn)力的關(guān)鍵因素,但目前廣泛應(yīng)用的無線傳感器網(wǎng)絡(luò)(WSN)在農(nóng)業(yè)領(lǐng)域存在許多局限性。例如,傳感器通常暴露在地面,容易受到外部環(huán)境的干擾,且這些傳感器大多依賴電池供電,一旦被埋入土壤,電池的更換將變得十分困難。此外,廢棄的電池可能對(duì)土壤環(huán)境造成污染。
為了解決這些問題,近年來研究人員對(duì)基于LoRa通訊技術(shù)的土壤監(jiān)測(cè)系統(tǒng)產(chǎn)生了濃厚興趣,LoRa技術(shù)相比傳統(tǒng)的無線通信技術(shù)(如ZigBee)具有更遠(yuǎn)的通信距離、更長的節(jié)點(diǎn)壽命以及更強(qiáng)的抗干擾能力。然而,這些LoRa傳感器的無線傳輸器暴露在空氣中,仍然可能阻礙農(nóng)業(yè)活動(dòng)并受環(huán)境因素影響。針對(duì)以上挑戰(zhàn),本文提出了一種基于RFID傳感器和LoRa技術(shù)的新型土壤環(huán)境監(jiān)測(cè)系統(tǒng)。該系統(tǒng)旨在通過低成本、長時(shí)間的精準(zhǔn)監(jiān)測(cè),克服現(xiàn)有技術(shù)的不足,為農(nóng)業(yè)領(lǐng)域提供一種更為有效和可持續(xù)的解決方案。
方法
該系統(tǒng)的核心由幾部分組成,包括嵌入土壤中的RFID傳感器、配備RFID讀取和LoRa通信功能的巡邏車、農(nóng)田監(jiān)控中心以及云平臺(tái)(圖1)。RFID傳感器被設(shè)計(jì)為高精度的環(huán)境監(jiān)測(cè)設(shè)備,能夠埋入土壤中,用于實(shí)時(shí)監(jiān)測(cè)土壤溫度、濕度和氯離子濃度等關(guān)鍵參數(shù)。巡邏車在系統(tǒng)中扮演著數(shù)據(jù)收集的角色,它通過內(nèi)置的RFID發(fā)射器為傳感器提供能量,并使用接收器來獲取傳感器發(fā)送的數(shù)據(jù)信號(hào)。巡邏車隨后通過LoRa模塊,將這些數(shù)據(jù)傳輸?shù)奖O(jiān)控中心,從而實(shí)現(xiàn)遠(yuǎn)距離的數(shù)據(jù)通信。
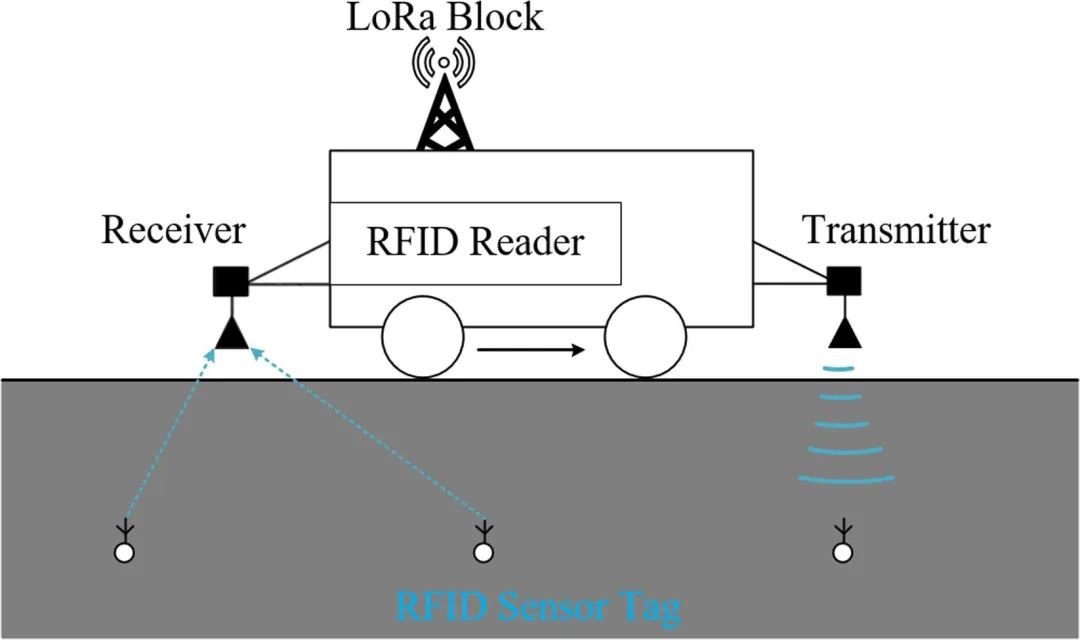
圖1 巡邏車通訊結(jié)構(gòu)示意圖
為提高數(shù)據(jù)傳輸?shù)男什p少系統(tǒng)的功耗,作者提出了一種創(chuàng)新的通信機(jī)制,不再依賴傳統(tǒng)的非易失性存儲(chǔ)器(NVM)來存儲(chǔ)數(shù)據(jù),而是將傳感器測(cè)得的數(shù)據(jù)直接編碼到RFID標(biāo)簽的ID中(圖2)。這種方式大幅度縮短了數(shù)據(jù)讀取的時(shí)間,降低了功耗,使得系統(tǒng)更加適合長時(shí)間、大范圍的監(jiān)測(cè)任務(wù)。此外,由于系統(tǒng)中RFID傳感器的標(biāo)簽數(shù)量相對(duì)較少,作者在設(shè)計(jì)中引入了基于EPC Gen2協(xié)議的Q算法,并結(jié)合閱讀器覆蓋碰撞避免安排(RCCAA)方法,來有效處理可能出現(xiàn)的多標(biāo)簽通信碰撞問題。通過這些設(shè)計(jì),該系統(tǒng)成功地實(shí)現(xiàn)了低功耗、高精度、遠(yuǎn)距離的土壤環(huán)境監(jiān)測(cè),具有較高的實(shí)用性和應(yīng)用前景。

圖2 RFID通信流程
RFID傳感器的電路設(shè)計(jì)由能量管理、通信和數(shù)字部分組成(圖3),能量管理部分通過天線進(jìn)行能量收集,并采用新型升壓整流器,將收集到的射頻能量轉(zhuǎn)換為直流電源,以為傳感器的其他部分提供穩(wěn)定的電壓。通信部分使用天線和RFID芯片進(jìn)行信號(hào)的無線傳輸和接收。為優(yōu)化天線設(shè)計(jì),作者選擇了尺寸較小但性能優(yōu)異的單極天線,并使用微帶阻抗變換器進(jìn)行匹配,從而在減小天線尺寸的同時(shí)確保了良好的通信性能。

圖3 設(shè)計(jì)結(jié)構(gòu)
結(jié)果
作者通過一系列實(shí)驗(yàn)驗(yàn)證了所設(shè)計(jì)的RFID傳感器及其在土壤環(huán)境監(jiān)測(cè)系統(tǒng)中的性能,圖4展示了現(xiàn)場(chǎng)測(cè)試環(huán)境。在實(shí)驗(yàn)室的通信性能測(cè)試中,結(jié)果顯示所設(shè)計(jì)的RFID傳感器在2米的距離內(nèi)、使用4瓦發(fā)射功率時(shí),能夠穩(wěn)定通信。相比于傳統(tǒng)數(shù)據(jù)存儲(chǔ)方法,作者提出的新方法顯著減少了數(shù)據(jù)傳輸時(shí)間和功耗。在現(xiàn)場(chǎng)應(yīng)用中,作者測(cè)試了RFID傳感器的最大通信距離和不同土壤埋設(shè)深度下的性能。結(jié)果表明,當(dāng)土壤濕度為5%且傳感器埋深為60厘米時(shí),最大通信距離可達(dá)1.3米;然而,超過這一埋深后,信號(hào)強(qiáng)度顯著下降,通信誤碼率也隨之增加。

圖4 現(xiàn)場(chǎng)測(cè)試環(huán)境
此外,實(shí)驗(yàn)還評(píng)估了土壤濕度對(duì)RFID傳感器通信性能的影響。隨著土壤濕度的增加,信號(hào)強(qiáng)度逐漸減弱,誤碼率也相應(yīng)升高,尤其當(dāng)濕度超過30%時(shí),傳感器的通信性能顯著下降,見圖5。為改善這一問題,作者提出了多傳感器布局方案,通過在同一測(cè)量點(diǎn)布置兩個(gè)“T”字形排列的RFID傳感器,有效降低了誤碼率,見圖6。最后,實(shí)驗(yàn)探討了巡邏車速度對(duì)RFID傳感器通信成功率及覆蓋面積的影響。結(jié)果表明,當(dāng)巡邏車速度保持在33公里/小時(shí)時(shí),通信成功率能夠超過90%,并且覆蓋面積達(dá)到10平方公里,是系統(tǒng)的最佳工作狀態(tài)。

圖5 土壤濕度對(duì)接收信號(hào)的影響

圖6 土壤濕度對(duì)傳感器位置改進(jìn)后接收信號(hào)的影響
結(jié)論
該系統(tǒng)基于RFID傳感器和LoRa技術(shù),能夠?qū)崿F(xiàn)對(duì)土壤溫度、濕度和氯離子濃度的長期、低功耗監(jiān)測(cè)。實(shí)驗(yàn)結(jié)果表明,所設(shè)計(jì)的RFID傳感器在埋深60厘米、土壤濕度小于30%的條件下,具有1.3米的有效通信距離,并且測(cè)量的溫度和濕度誤差分別為1.5%和1.0%,巡邏車的速度為33公里/小時(shí),效果最佳。