登錄
登錄
 注冊
注冊
rfid技術助力AGV站點識別及路徑規劃
傳統AGV車主要依靠固定的磁條線進行導航,雖布設成本低、定位精確,但面臨著靈活性差、只能按照磁條行走、作業效率低等問題,且容易受到周圍金屬物資的干擾,難以滿足復雜線路的需求,為進一步提升AGV車的使用性能,將RFID技術與磁導航技術相結合。由于RFID不會受到磁條、鋪設、環境等因素的影響,所以RFID傳感器可以非常精準的識別到RFID地標標簽信息,從而可以在關鍵節點對AGV車進行站點識別和路徑規劃。

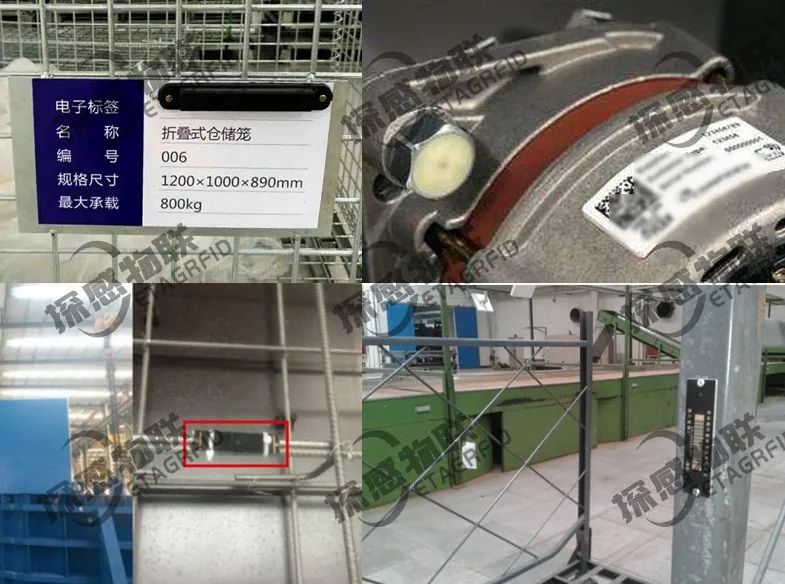
1、AGV無人搬運小車站點識別及路徑規劃通過在AGV小車底部加裝RFID地標傳感器,行車節點安裝RFID地標標簽,當AGV小車行駛至每個節點時,地標傳感器就會自動獲取地標卡信息進行數據傳輸,以便AGV小車作出變速、轉向、停車、等相應動作,助力AGV車進行精準的站點識別及路徑規劃,實現物料運輸的自動化、信息化、透明化、高效率管控。

要做到精準停車,RFID地標傳感器要有適中且穩定的讀卡距離,讀距太近意味著AGV底盤要做的很低,這無疑增加小車故障率,讀距太遠則意味著定位不準確,無法實現精準的站點識別。RFID地標傳感器還需要達到一定的識讀速度,識別速度如果跟不上AGV的行駛速度,那么將會導致RFID地標傳感器無法讀取到地標標簽的信息,控制系統會因接收不到信息無法給AGV執行站點識別和路徑規劃的指令。
2、掛軌巡檢機器人站點識別及路徑規劃掛軌巡檢機器人能夠替代人工完成例行巡查、故障診斷、預警報警等任務,突破傳統人工巡檢的限制,實現巡檢智能化,主要應用場景有:配電房、管廊、隧道、化工廠、機房等。通過將RFID標簽安裝在行車軌道上,RFID傳感器安裝在巡檢機器人內面向軌道標簽的一面,以便減少周圍環境對RFID傳感器讀取標簽的影響。

當裝有RFID傳感器的巡檢機器人行駛至相應的軌道節點時,自動讀取RFID標簽信息,根據讀取到的標簽信息對自身進行站點識別及路徑規劃,再將相應站點的巡檢信息一并上傳到巡檢管理系統。根據巡檢機器人的行駛速度來選擇合適的RFID傳感器以便能夠精準的進行站點識別和路徑規劃,這種應用場景下的軌道一般以金屬材質為主,因此需搭配具備抗金屬性能的RFID標簽使用。
3、AGV無人叉車站點識別及路徑規劃AGV無人叉車是一種自動導航的移動機器人,可代替人工搬運,實現物料運輸、裝卸貨物等任務,目前AGV叉車應用較多的場景為高位倉庫、庫外收貨區、產線轉運等,主要用于生產制造、物流等行業。

通過在AGV叉車上安裝RFID傳感器感知環境獲取標簽信息并做出相應決策,依據預設的路徑規劃進行站點識別完成自主導航,并通過在貨物托盤、貨位貨架等地方安裝RFID標簽來識別貨物信息(批次、倉庫存放信息等),AGV叉車再根據RFID傳感器讀取到的標簽信息規劃貨物運輸的站點路徑,實現對貨物的自動識別和定位,以便精準叉取貨物,同時還可監管貨物流轉的每個環節。